【MOKU:GO】 PID控制器实际操作案例分析

实验介绍
比例积分微分 (PID) 控制器是最常见的反馈控制形式之一用于各种应用例如汽车 的巡航控制或飞行无人机的电机控制PID 控制器的目的是驱动过程达到指定的输 出,通常称为设定点控制器的反馈用于调节和优化该过程的控制。
此应用程序的 目的是介绍 Moku:Go 的 PID 控制器以及如何将其轻松集成到实验室环境中以教 授控制理论。通常,控制理论主要通过严格的数学建模和计算来教授,课堂上的 少数实验室以控制物体的温度或直流电机的速度为中心。
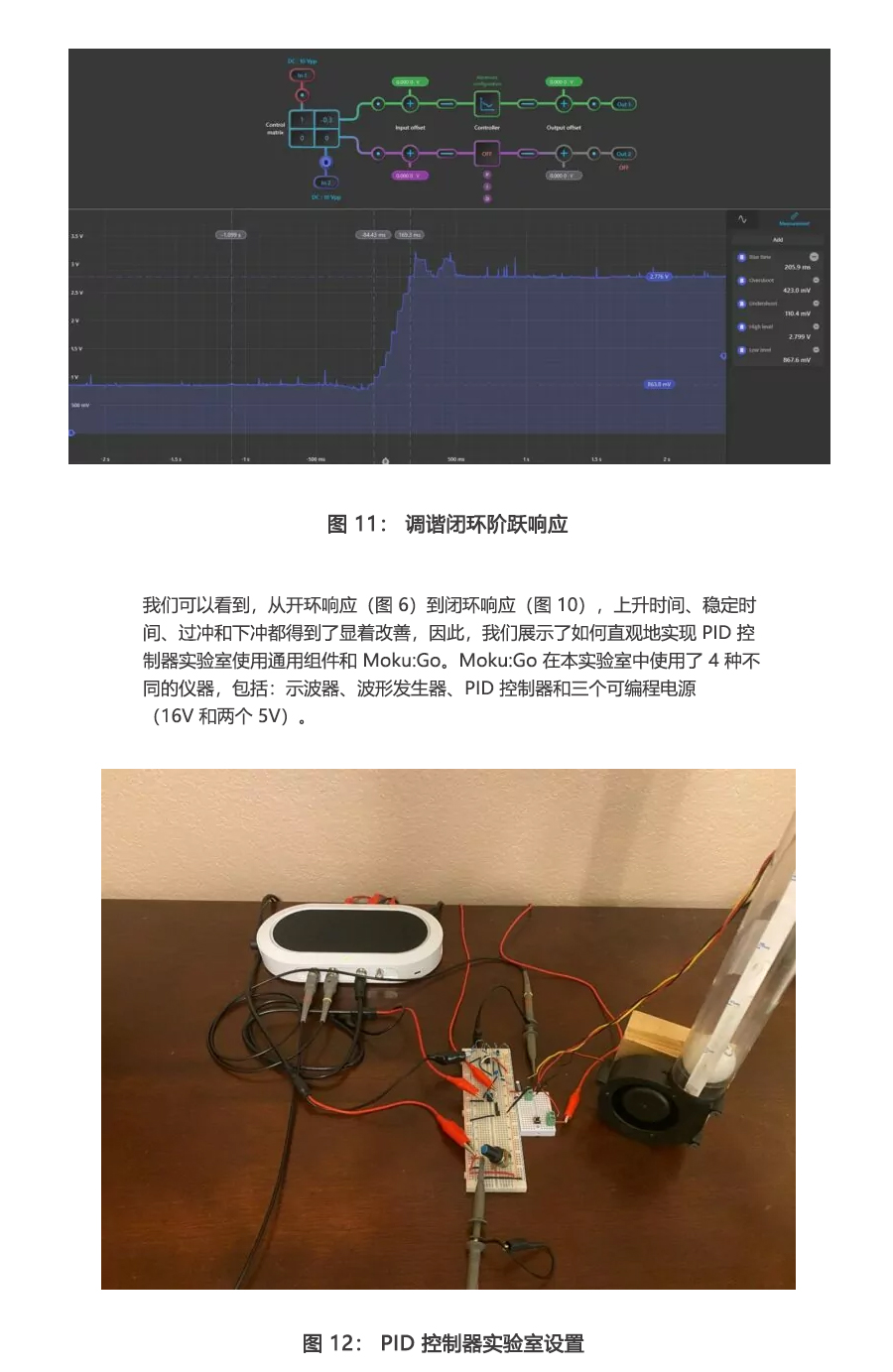
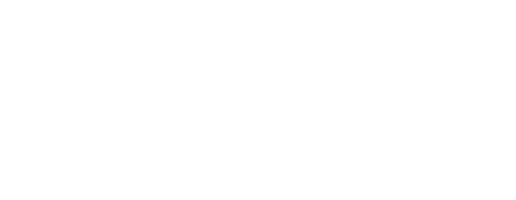
本笔记介绍了控制理论 教育的现代方法,通过应用更直观的组件帮助学生更容易地将课堂上学到的理论 与物理控制系统联系起来。这是通过使用直流电机风扇、红外距离传感器和 Moku:Go 控制乒乓球的高度来实现的Moku:Go 包含一个集成示波器、 PID 控制器、波形发生器和可编程电源,可驱动电机控制电路、接收传感器数据 并输出指定信号以控制直流电机的速度。
这样,通过比较不同实现之间的乒乓球 的上升时间、超调量和稳态高度等特性,可以很容易地发现何时实施 PID 控制器 与未实施 PID 控制器之间的差异。它还允许通过 Moku:Go 应用程序进行实时调 整,以便学生可以看到不同的 PID 增益如何在数学和物理上影响系统。本实验的 完整组件列表可以在下面的实验设置部分找到。
如果不是,则可以通过比较不同 实现之间的乒乓球的上升时间、过冲和稳态高度等特性来轻松发现。它还允许通 过 Moku:Go 应用程序进行实时调整,以便学生可以看到不同的 PID 增益如何在 数学和物理上影响系统。
本实验的完整组件列表可以在下面的实验设置部分找到。 如果不是,则可以通过比较不同实现之间的乒乓球的上升时间、过冲和稳态高度 等特性来轻松发现。
它还允许通过 Moku:Go 应用程序进行实时调整,以便学生 可以看到不同的 PID 增益如何在数学和物理上影响系统。本实验的完整组件列表 可以在下面的实验设置部分找到。